i2O2Te光電探測器的應用引言:自從2D Bi2O2Se材料合成報道以來,研究發現該材料不同于傳統的范德華2D層狀結構,因為其層通過相對較弱的靜電力保持在一起。重要的是,通過化學氣相沉積(CVD)方法制備2D Bi2O2Se納米片顯示出>20000 cm2V?1s?1的超高霍爾遷移率值和約0.8 ev的帶隙能量,由于量子限制效應,其強烈依賴于膜厚度。這導致了相關研究工作者對二維氧氯鉍(Bi2O2X:X=S,Se,Te)族的研究興趣的增加。然而,迄今為止,很少研究2D Bi2O2Te,它是Bi2O2Se的表親材料,由具有I4/mmm空間群(a=3.98?,c=12.70?)的四方結構組成 ...
利用反射光在光電探測器上的干涉所產生的強度來獲得樣品的反射率分布。為了克服物理移動參考臂的需要,并獲得樣品的光譜信息,創建了傅里葉域或譜域OCT。在第二種方法中,用光譜儀代替TD-OCT檢測器,觀察干涉后反射光的光譜圖,然后利用其傅里葉變換獲得樣品的a掃描。此外,第三種方式稱為掃描源OCT,即每次以不同的窄帶寬波長掃描樣品,并通過快速單個傳感器連續檢測光譜干涉信號的每個波長。所有這些模態的橫向分辨率是由光源的特性決定的;具有小光束直徑、大聚焦和寬近紅外帶寬的低相干激光束是OCT的理想儀器。此外,人們對使用可見光與OCT (Vis-OCT)創建3D體內圖像也越來越感興趣。一些研究人員也在探索利用 ...
(PPG)、光電探測器(PD)、可變光衰減器(VOA)、低通濾波器(LPF)、功率計(PM)、單模光纖(SMF)、偏振分束器(PBS)。子通道添加系統經過優化以減少反射,由一個10dB和一個3dB電衰減器以及一個6dB電合并器組成。為了利用VCSELI-P特性曲線的線性區域,利用SHF的一個高線性放大器將電信號放大到1Vpp。VCSEL的L-I-V曲線如圖2.a)所示。使用的VCSEL是一種高速短腔VCSEL,發射波長1.55μm,調制帶寬為18GHz,溫度為20°C。帶有4PAM信號的調制VCSEL的頻譜如圖1所示。具體VCSEL特性的詳細描述可以在中找到。VCSEL的偏置設置為10mA以獲 ...
)的PIN-光電探測器(PicometrixPT-28E)組成,總帶寬為30GHz。隨后,安捷倫公司的80-GS/s實時示波器,帶寬為29GHz,將接收到的信號數字化并存儲,以供進一步的離線后處理B.DSP作為發射器和接收器在發送端,由兩個長度為215的二進制DeBruijn序列產生一個灰度編碼的PAM-4信號,其中一個序列移位一半序列長度以保證足夠的去相關。在接下來的步驟中,信號被上采樣兩個因子,并在時域中用矩形濾波器進行整形,然后應用3分路預均衡器。在光學背靠背(b2b)模式下,前后光標被調整為z佳誤碼率。z后將信號量化后送入84-GS/s的DAC產生電PAM-4信號。本文將對不同的接收機 ...
0GHz內部光電探測器在示波器上觀察了眼圖,并給出了圖4所示的走線。除非另有說明,進入前置放大器的光功率電平控制在±20dBm,進入PD的光功率電平控制在-9dBm。表2給出了傳輸上行鏈路中這些關鍵點的光消光比和光信噪比觀測值。圖4使用10GHzPD拍攝的10.7Gb/sNRZ-OOK信號的PD后電眼圖(a)CPE背對背觀測,(b)35km無補償SMF觀測,(c)40km無補償SMF觀測,(d)50km匹配跨度MS1觀測垂直刻度:(a,b,c,d)300mV/div水平刻度:(a,b,c)50ps/div,(d)20ps/div在CPE輸出處觀察到一個清晰的睜眼,如圖3(A)和4(A)所示。我 ...
GHzPIN光電探測器(PD)的放大自發發射(ASE)噪聲,提高OSNR。PD輸入端平均光功率為±9dBm,完全符合器件的線性響應范圍。濾波器的頻寬足夠大,可以讓整個調制信號通過PD,同時消除大部分帶外ASE。然而,由于激光輸出波長在實驗過程中漂移(如圖2所示),因此在實驗過程中持續監測PD輸入的光譜,以確保不利用偏移濾波的好處。激光與OTF通帶光譜之間的偏移會導致直接調制激光啁啾光信號的不對稱濾波;所得到的頻率-強度轉換將以一種可以提高PD輸入消光比的方式扭曲PD輸入,前提是OTF通帶相對于激光光譜被正確調諧。具有容納整個VCSEL漂移范圍的大FWHM的OTF是可取的,因為這將提供更通用的接 ...
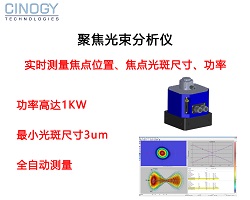
CD作為一款光電探測器,常用于捕捉激光光束入射橫截面的能量分布,因為CCD能夠承受的激光功率較弱,常通過增加衰減片以及控制曝光時間等方式調節入射激光能量。電腦上的軟件控制CCD完成光束采集,并完成信號處理,因為采集的信號存在噪聲,所以在此之前需要先采集背景光信息并且在計算光束寬度之前將其扣除。常見的光束計算方法有刀口法、狹縫法和4σ等,本文所使用的方法為4σ。ISO中采用4σ定義光束寬度,該方法基于光軸z處光束截面內光強分布的二階矩來定義主軸方向的光束寬度dx和dy。其中式中σx和σy是光束光強分布E(x,y)主軸方向的二階矩。式中,是光強分布E(x,y)的一階矩,物理意義為光束橫截面內光強分 ...
位有關,目前光電探測器無法實現光相位的檢測。針對fceo的測量一個較為理想且成熟的方法是自參考f-2f技術。鎖模激光器是光學頻率梳的基礎。在20世紀,鈦藍寶石(Ti)激光器是一種常用的鎖模激光器,具有寬廣的增益帶寬,能夠產生飛秒(10^-15秒)級的超短脈沖。通過Kerr透鏡鎖模(Kerr Lens Mode-Locking, KLM)技術,可以實現穩定的鎖模操作,產生寬帶的光學頻率梳。摻鉺光纖激光器(Erbium-Doped Fiber Lasers)是一種基于摻鉺光纖放大的鎖模激光器,通常工作在1.55微米的波長范圍,適用于光通信領域。利用非線性偏振旋轉或飽和吸收體實現鎖模操作,能夠產生穩 ...
于光路延遲和光電探測器延遲,觸發信號經常先于脈沖信號。在這種情況下,觸發延遲的補償將至關重要。(3)選擇平均器的長度選擇合適的平均周期數,以在足夠的SNR和速度之間取得平衡。(4)調整增益對步驟3的結果應用衰減或放大,以防止輸出飽和或Max限度地減少潛在的量化誤差,Max限度地利用Moku的輸出范圍。圖4實現Boxcar平均器的操作流程圖。在以下章節中,我們將分別通過與Python控制面板和云編譯(Moku Cloud Compile,MCC)控制寄存器交互來介紹在Moku:Pro上配置Boxcar平均器的步驟。使用 Python 控制Boxcar平均器下面是通過 Python 控制面板實現箱 ...
波形發生器、光電探測器)之間的異步觸發會導致結果不可靠或錯過事件。物理延遲線或參考時鐘中的相位漂移也會引入系統誤差。所以,這要求我們的測試測量設備不僅需要穩定的內部時鐘參考,并且能夠提供多種設備協同工作時的同步能力,另外在探測事件時間時需要提供高時間分辨率以及低時間抖動。在量子傳感任務中,如何從嘈雜的環境中獲得精確的測量結果也至關重要。如前所述,環境電磁場噪聲、激光強度波動等會掩蓋微弱的信號。系統固有的漂移和噪聲也會掩蓋掉信號的微小的頻率變化或相移。另外,在低信噪比 (SNR) 條件下對信號進行讀取也面臨巨大的技術難度,尤其是在低計數率系統中,例如針對單個離子進行測試測量。針對這項挑戰,在實際 ...
或 投遞簡歷至: hr@auniontech.com